Recently, IEEE Transactions on Pattern Analysis and Machine Intelligence (IF = 17.86) published online the results of the research group led by Li Jiayuan, a young teacher and distinguished researcher in the School of Remote Sensing and Information Engineering. The findings realized the high-precision automatic point cloud registration technology of laser scanning visual feature level.
The paper is entitled “A Practical O (N2) Outlier Removal Method for Correspondence-based Point Cloud Registration”. Aiming at the problem of high gross error ratio (mismatch rate > 95%) in feature level point cloud registration, this work defines the concepts of correspondence matrix (CM) and augmented correspondence matrix (ACM), constructs the model of determinant minimization cost function under non-full rank constraint, implements automatic detection of gross error matching based on the boundary theory, and proposes a scale adaptive Cauchy robust estimation model to realize high-efficiency, high-precision automatic registration and precision point cloud data with 99% mismatch rate.
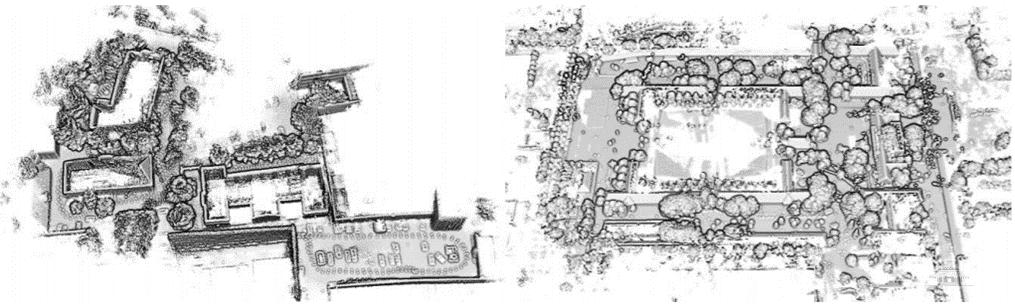
Multi-site cloud automatic registration mapping effect
The research group has applied the findings to the real-time localization and mapping of intelligent driving, and proposed a hierarchical SLAM method based on three-dimensional laser data, which realizes the high-precision autonomous positioning and attitude determination of intelligent unmanned system without GNSS, ranking seventh in the world-famous smart driving public data set KITTI (ranking fourth in the world in pure laser SLAM algorithm).
Link to KITTI:http://www.cvlibs.net/datasets/kitti/eval_odometry.php
(name: HMLO-whu)

Pure laser positioning and mapping effect
In recent years, with the support of the National Natural Science Foundation of China, the National Key Research and Development Program, and the Post-doctoral Innovation Talents Program, Li Jiayuan has devoted himself to the research of key technologies in autonomous navigation, positioning and mapping of intelligent unmanned systems. He has made a series of achievements, the results of which have been published in nearly 30 well-known journals in the field of computer vision, image processing, photogrammetry and remote sensing including IEEE Transactions on Image Processing, the ISPRS Journal of Photogrammetry and Remote Sensing, IEEE Transactions on Geoscience and Remote Sensing and the Journal of Surveying and Mapping. His research has overcome a series of technical barriers such as large geometry and large radiation distortion image matching, robust estimation of high gross error ratio, and automatic registration of high reliability feature level laser point cloud. Moreover, his work has also formed the theory and method of visual and laser SLAM, and completed the accumulation of some key technologies for high precision autonomous positioning and navigation of intelligent unmanned systems.
Link to the paper:https://ieeexplore.ieee.org/abstract/document/9373914
Written by 万舒良
Rewritten by 沈妤恬
Edited by 董晓倩